top of page

Research
Research Interests
Research Topics
-
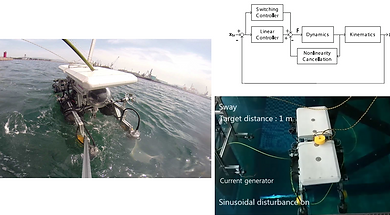
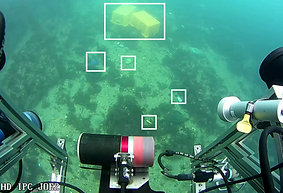
Underwater Robotics (해양로봇)
- 수중로봇개발 Autonomous underwater vehicle (AUV)
- Underwater sensing & perception
- SONAR-based seabed mapping
-
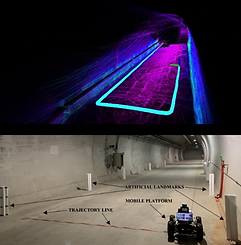
Field Robotics (필드로봇)
- Robust Perception
- Multi-sensor fusion(LiDAR + RADAR)
- Mapping and localization in an unstructured environment
- 특수환경용 필드로봇 개발(건설동굴 조사용 AGV, 페인팅용 Wall-climbing robot)
-
Mobile Robotics(모바일 로봇)
- LiDAR SLAM
- AMR
- Localization and spatial intelligence





bottom of page